
:יש לפתח מערכת ניווט המסתמכת על חיישני אינרציאליים ומצלמה. הפרויקט כולל שני שלבים
שלב 1: פיתוח מד מהירות בעזרת עיבוד אות מצלמת ה-Smartphone. ה-Smartphone מצלם בתנועה תוואי קרקע מוגדר עם סמנים מתאימים ומחשב מהירות התקדמות.
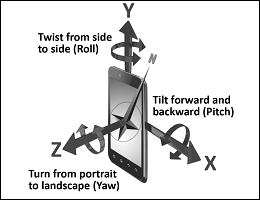
שלב 2: פיתוח מערכת ניווט המסתמכת על חיישני ה-Smartphone ללא שימוש ב- GPS . מערכת הניווט תכלול קלטים מהחיישנים האינרציאליים של ה-Smartphone יחד עם מד המהירות שפותח, הקלטים יעובדו בעזרת מסנן קלמן לא לינארי UKF Unscented Kalman Filter . המערכת תפותח על מחשב מבוסס MATLAB. אופציה – מערכת הניווט תתורגם לשפת אנדרואיד ותיושם על Smartphone.