Fuzzy logic is an approach to computing based on "degrees of truth" rather than the usual "true or false" (1 or 0) Boolean logic on which the modern computer is based. The most successful applications of fuzzy systems theory are in the fields of automatic decision making and automatic control. It provides a very convenient design tool which can incorporate linguistic information, common sense, expertise, and rigorous analysis.
In this project we designed a fuzzy logic controller for non-linear dynamics model of the inverted pendulum-type mobile robot and verified its function through simulation and embedded it on the real robot too.
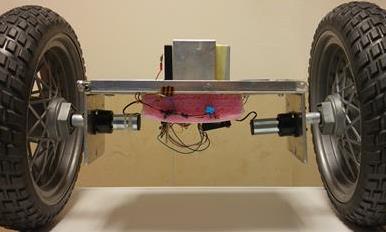
The inverted pendulum-type mobile robot consists of two wheels and a pole in between. The system measures tilting of this pole using acceleration and gyro sensor and was controlled by mobile application which communicate with the robot using Bluetooth.