In this document we will review the Stewart Platform parallel robot and its inverse kinematics model. We will also introduce the control algorithms, the control loop and the micro controller which we used.
Stewart platform
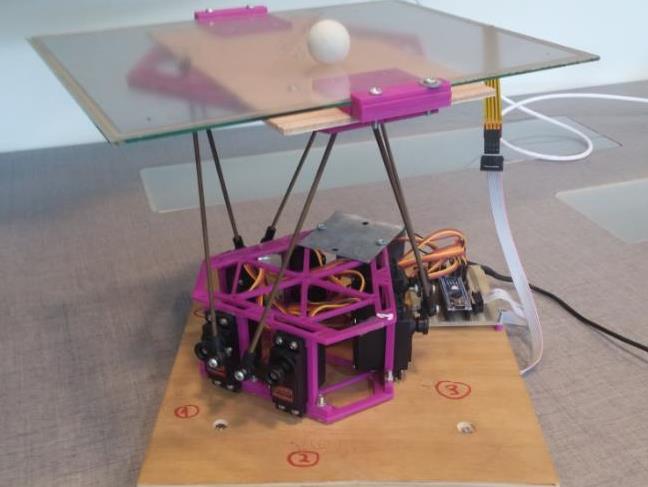
Stewart platform is a type of parallel robot which allows wide control in the upper plate of the robot. This control is achieved using six motors placed on the lower plate and connected in pairs to three locations in the upper plate
Using the inverse kinematics theorem, one can receive the connection between the motor angles to the platform's angles and location. We used this connection in the control scheme, which we planned
The MPC block receives the reference location and the state variables, and calculates the platform angles needed to stabilize the ball. Inverse kinematics block calculates the needed motor angles. The controlled motors move the touch plate which moves the ball.