
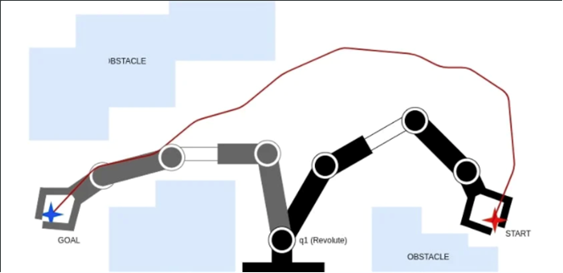
MuZero is a recent reinforcement learning (RL) algorithm that learns how to plan by combining ideas from the planning and the RL communities. In this project we would like to investigate: how well can MuZero solve the motion planning problem? In the motion planning problem a robot needs to navigate between a start position to a goal position without colliding with obstacles along the way. This problem is particularly difficult as the rewards are sparse, exploration is difficult, and the horizon is long.
In this project you will learn:
The theory behind one of the most powerful RL algorithms currently used.
How to apply it to a new difficult domain (robotic motion planning).
How to train models, debug code and track experiments for deep RL models.