
Drones are currently in widespread usage, due to their low price, ease of use, practicality, and suitability for many different tasks. Since most of drones’ tasks include navigation, autonomous camera-based navigation system has become a fundamental feature that is required by all drones.
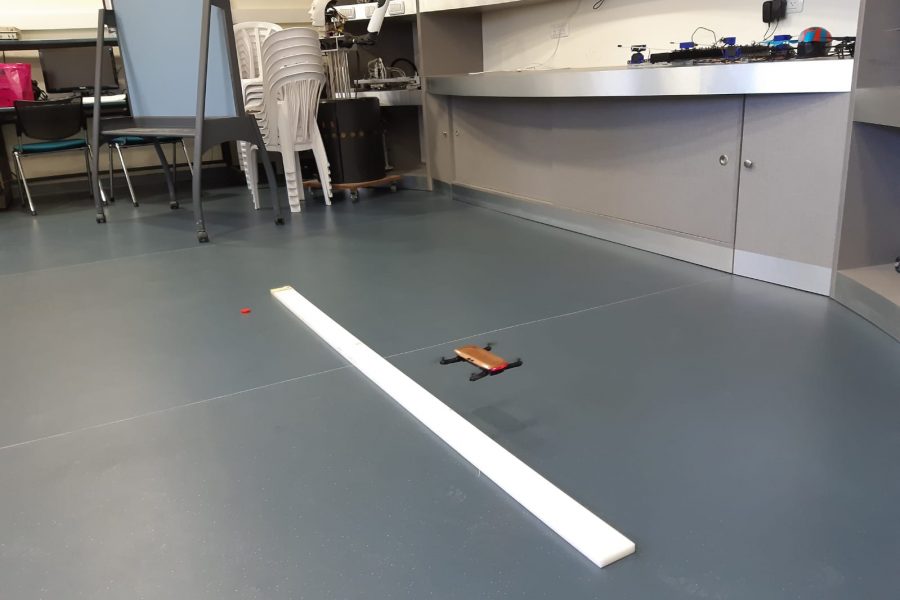
In this project we check the possibility of implementing autonomous tracking system to control the navigation of a simple drone equipped with a camera (model JJRC ELFIE PLUS) that was not initially programmed for tracking or computer-control. Specifically, we would like to test the drone’s ability of tracking a line and identifying a red round object along the line.
At first, we started from a basic control program written in python for Ubuntu environment. This program was written by our tutor. Afterwards, we developed image processing algorithms to enable control on drone’s movements, using Opencv library. Then, we programed a simple controller and integrated the code to a single program. In practice, the algorithms we developed accomplish their goals, but the interface with the drone does not work properly and the tracking is not executed.