
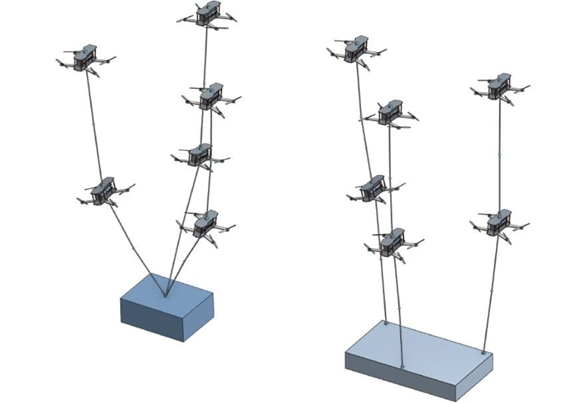
בפרויקט זה נתמקד בשיתוף פעולה בין יחידות רובוטיות, רחפנים, על מנת לבצע משימה אשר כל אחד מהם בנפרד איננו יכול לבצעה אך ביחד הדבר אפשרי. דוגמא למשימה כזו הינה הרמת משא כבד, שרחפן אחד לא מסוגל להרים אך שניים כן.
בעיות מסוג זה טומנות בחובן מספר של בעיות סנכרון ברמת קבלת ההחלטות – לאן כל רחפן צריך לגשת כדי להרים את החבילה, ועד ביצוע משותף לאורך זמן – תכנון מסלול מתוזמן לכל הרחפנים כך שהם שומרים על מבנה מרחק מהירות וכו’, אחד מן השני על מנת שהחבילה לא תיפול תתהפך או יגרם נזק לאחד הרחפים.
בפרויקט זה נתמקד בחלק של תכנון המסלול והביצוע המשותף ונציע אלגוריתם תכנון מסלול עבור מספר רחפנים לבעיה של הרמת משא והנעתו מנקודה א’ לנקודה ב’.