
מטרה: למפות חדר בעזרת מערך מצלמות וחיישנים (לדוגמא, טלפון, LIDAR, וכד’).
תאור: הפרויקט יכלול נושאים של עיבוד תמונה, סטריאומטריה, אופטימיזציה ותכנות.
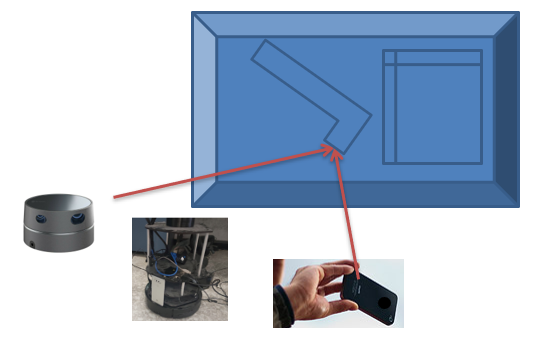
כאשר מצלמים סצנה בעזרת מצלמה אחת, ניתן לקבל את כיוון העצמים או המאפיינים שבתצלום אך לא את העומק של העצמים. לכן, ננסה להשתמש בשילוב של מערך חיישנים כדוגמת LIDAR, ומצלמות המותקנות על רובוט Kabuki. שילוב כל המדידות יאפשר שחזור תלת מימדי של החדר.
המשימות העיקריות: שילוב חיישנים וניצול היתרונות היחסיים של כל חיישן, פיזור אופטימלי של סנסורים בחדר, שחזור תלת מימדי.