
Tracking maneuvering targets is a challenging problem, as a consequence of different parameters related to the sensors e.g. measurement noise, position’s indirect measurements (such as relative angle measure), sensor fusion etc. and requirements related to control system like stabilization, detectability etc.
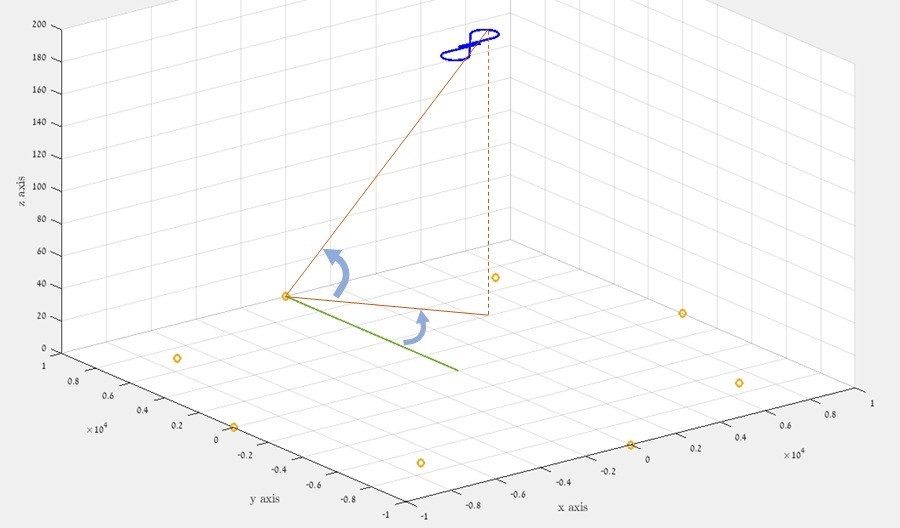
The following project is a window of understating into Kalman filter algorithm’s manner of operation, as well as the problem of tracking a maneuvering air targets, using grounded sensors which are capable of measuring elevation and planar angles solely. As a part of the project we have implemented and compared variety algorithms described in the literature, among which are EKF (Extended Kalman Filter which is a non-liner extension of the traditional Kalman filter), IMM (Interacting Multiple Model) and Kalman filter based on triangulation (using LS as our criterion).
Additionally, we tested the robustness of those algorithms to errors and how the locations of the sensors (their scattering in space) affects the quality of the measurement, and what are the benefits of smart placing of the sensors