
Today there is a complicated problem in the world of aviation – finding an optimal flight path while considering various constraints such as:
- defined routes
- time-limited flight zones
- different altitudes
- arrival time
- wind, fuel and more.
Organizations are willing to invest a lot of resources in order to solve this problem.
In our project we will offer implementation to solve this problem while considering those constraints and using information that is accessible to the public.
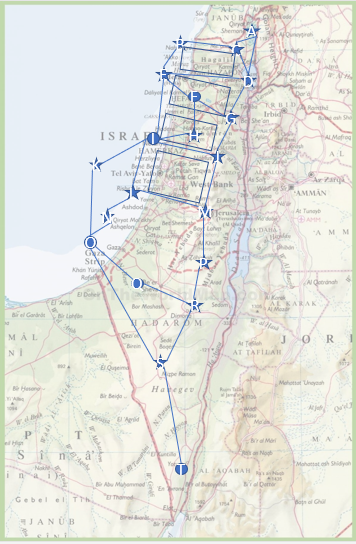
We are modeling Israel map into nodes and arcs and finding the optimal path using A* algorithm and Gurobi optimizer (Python package).
We are using the optimizer to know for each iteration of the A*, if the path is feasible or not. It means that it’s not an obvious A* algorithm, it’s adapted one for our goal.
In addition, we modeled our problem to a linear problem.
We want the shortest path (in time) with the given constraints that we mentioned before. We also defined the constraints such that they will be suitable to drones too. It means that the aircraft can stay at a certain node without moving.