
Important milestones in realizing the vision of autonomous cars are lane detection and road sign detection. Using autonomous means of transportation could lower travel costs, reduce private car ownership and reduce the number of road accidents. The ability to know and act on traffic laws is essential for maintaining public order, the lives of drivers and pedestrians.
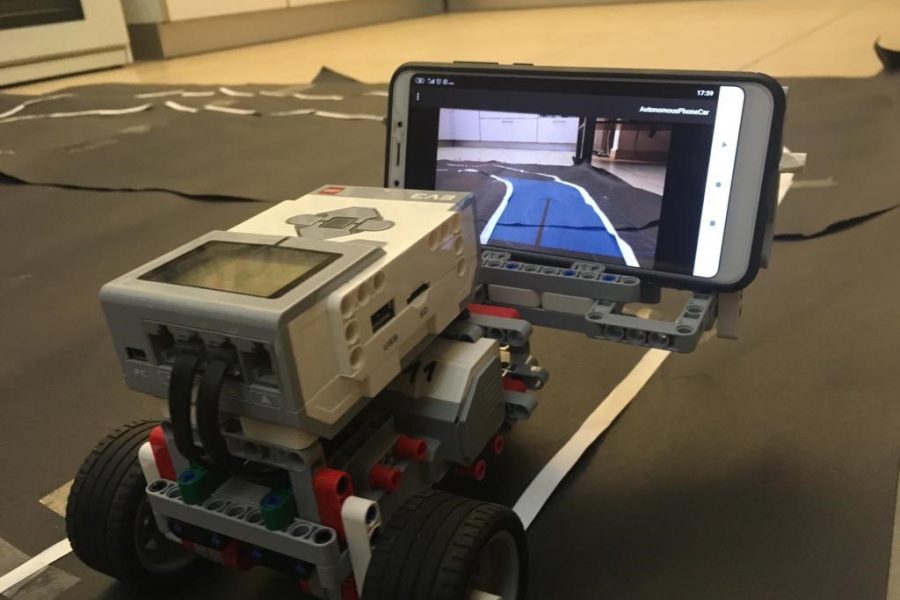
This project realizes part of a vision of “smart city” simulations by educational robots. In the project, we developed an application for the cell phone that controls an educational robot and transmits travel commands to it, with the smartphone sitting in a special device on top of the robot. The app we developed can detect road signs and the route of the road in real-time and manage the movement of the robot using a smartphone that is found in almost every pocket in the modern world. The app uses the phone’s built-in camera, a machine learning model trained to recognize road signs and image processing algorithms, thus enabling it to identify the road signs and route from a list entered into the app in advance. The app marks in real time the route found and displays an arrow, which gives an indication of the direction in which the robot should move.
This project is a sequel to the previous project we did together. In the current project we have added deep learning capabilities and more advanced algorithms that also include lane tracking, and we have tried to expand the application robot control capabilities.