
Goals
- Planning a suitable path using the RRT* algorithm, avoiding different obstacles spread out on the land.
- Autonomous executing of the route by a drone.
Project summary
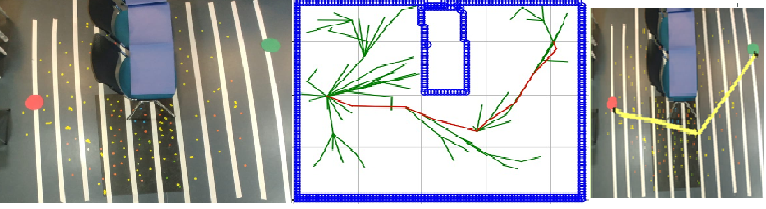
First, an overhead image is taken using a cellphone. The image will go through image processing manipulations, using python algorithms (Color-based detection). These algorithms output a data set that will be given to the RRT* algorithm, an algorithm that is designed to search route to a target by building a space filling tree. It receives a starting point, target point and obstacle’s locations. RRT* outputs a path that we convert, using mathematical computations, to a set of commands for the drone. Then, we use navigation tools to get the drone reach its target point.
For the drone to navigate in space, we used a PID controller which keeps the current angle of the drone fixed on the desired angle. The forward motion is controlled by lines-counting mechanism.
When successfully arriving to the target point, the drone will land.