
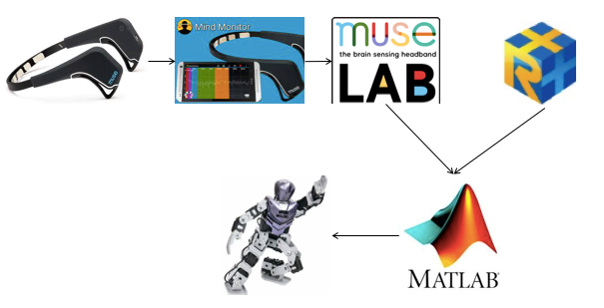
Our main goal was to control a BIOLOID robot movements by eye blinking and head movements, using the MATLAB as development environment.
We needed to develop a filter that detects eye blinking and then differentiate between short and long blinks. We also set a goal for ourselves, to create a language that is similar to Morse code, that consists of a sequence of three blinks. We translated this language to commands that leads specific movements of the robot (according to the command).
Our main challenges during this project, were to integrate the interfaces of the robot and the Muse device, filtering eye blinking from EEG data, creating new movements by mixing some already existent movements, and to cope with the balance of the robot.