
In our project we explored and mapped an uncharted area with multiple robots.
This was a two parts project: the first one is simulation and second is live experiment in the lab.
The robots that we used for the project were 3 Turtlebot v2 robots.
Each Turtlebot is equipped with a Kinect camera which provides it laser scanner.
It is also equipped with an acceleration sensor.
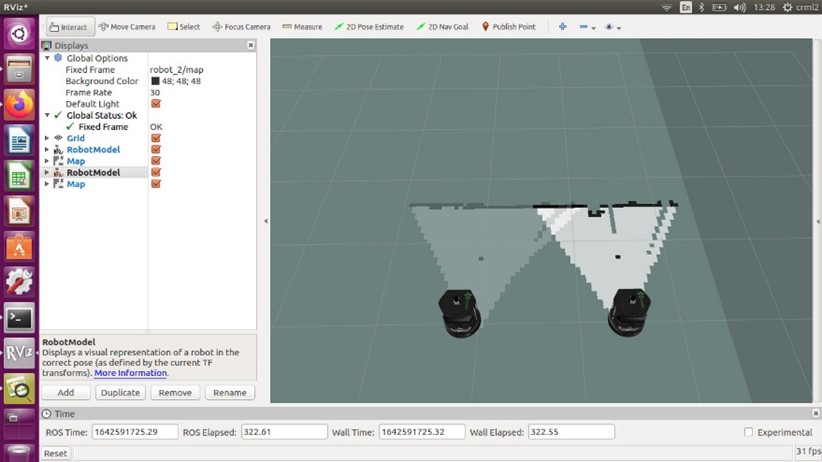
The robots use explore and SLAM algorithms for navigation and mapping, and communicate with each other through by creating TCP connection via Wi-Fi network.
Our biggest challenges were the following:
- Implementing parallel robot navigation
- Integrate between the many parts of the system
- Dealing with the load of computation due to a large-scale system
- Learning from scratch the robot development environment and tools
In the end the whole system creates an overall map of the new area.
We believe that in the future this technology can be used for exploring fast dangerous areas instead of human, and meanwhile this project opens a door for new interesting and exciting multi-agent projects in CRML lab.