
In this project we will be tracking a target using multi-static sensors with two different approaches.
Firstly, creating a path that describes the target movement in 2D then creating linear measurements by adding a measurement noise to the path, then using linear Kalman filter in order to estimate the target’s position.
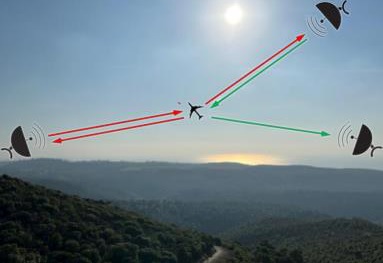
Since using multi-static sensors will give range measurements which are non-linear, a different approach should be applied to estimate the target’s position.
First approach, which called tightly coupled (TC), it’s a method were the estimation is done without any data processing meaning using a non-linear filter- which in our case is extended Kalman filter, in order to deal with non-linear measurements(range) to estimate the target’s position.
Second approach, which called loosely coupled (LC), it’s a method were the estimation is done after the data has been processed, meaning the data been processed before applying the linear filter, in this case trilateration algorithm, will be used as an data processor, which will convert range measurements into linear measurements, then applying linear filter which is Kalman filter in order to estimate the target’s position.
Performance analysis will be done in order to examine how different factors will affect the estimation efficiency.