
As robots will start to handle more tasks in society, so does the chance for damage to them increases. Such damages are usually not incorporated inside their training scenarios and therefore, their behavior will become unpredictable.
While some tasks can sustain such risk, in others, such as rescue missions, or handling of dangerous substances, a mission cannot be aborted in the middle. For robots to be successfully integrated in such missions, they must be able to operate even after minor physical damage.
In this project, we took a regular quadruped robot (go1 edu) and taught it to walk in 2 different scenarios: a joint’s motor is stuck in a specific position, and a joint become completely loose. With such learned policies, an operator can change the robot’s policy when an accident occur with similar consequences.
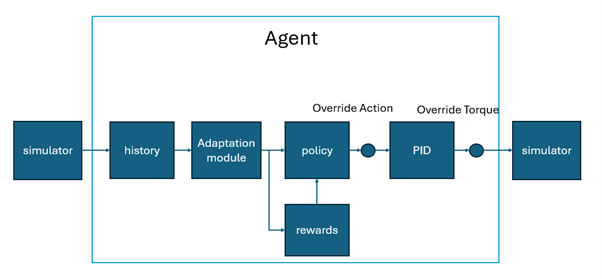
In order to learn such policies, we took the RL learning environment from the article “walk these ways” and added these error mechanisms to override the motors behavior. The RL environment managed to learn and adapt to the new joints behavior and walk without them.