
Amputation of limbs, particularly arms, can result from work accidents, road accidents, combat injuries, or congenital conditions. Various solutions exist to help arm amputees function as normally as possible. The market offers different products, some of which are expensive, heavy, and cumbersome for daily use. Additionally, some solutions involve arm movement through different body parts, including the muscles of the amputated arm, which is not preferred for amputees suffering from phantom pain. Our project aims to address these shortcomings.
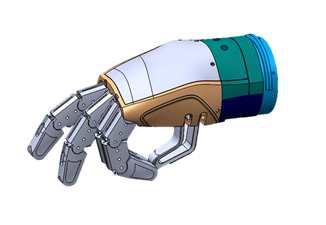
The project is conducted in collaboration with the “Haifa3D” association, which offers one of its services: a 3D-printed robotic prosthetic hand. This hand is provided free of charge to any arm amputee who approaches the association, tailored to their measurements and personal needs.
The presented project is a collaboration with the association, aiming to enable the activation of various features of the robotic arm through gestures and movements of the shoulder and leg, acquired using a sensing and control system. Shoulder movement sensing will be performed using suitable sensors in a wearable and consumer-friendly configuration, with one of our main goals being to make the product as simple and efficient as possible for the user.