
This project focuses on integrating tactile sensors into a prosthetic hand and providing feedback to the user, with an emphasis on a cost-effective solution to ensure accessibility for a broader population.
As part of the project, a literature review was conducted to examine existing solutions, sensor types, and various feedback methods.
The review identified key criteria for sensor selection and their optimal placement within the system.
Temperature and force sensors were selected based on a comparative analysis of various options, prioritizing those that best met our project requirements.
The selected sensors were tested and demonstrated satisfactory performance. Subsequently, suitable feedback methods were chosen and tested to ensure compatibility with the required feedback mechanism.
An electrical circuit was designed to integrate the sensors, feedback devices, and the ESP32 controller.
An algorithm was defined to process data from the sensors and provide appropriate feedback through the selected devices.
The code was written in C++ using the Arduino environment.
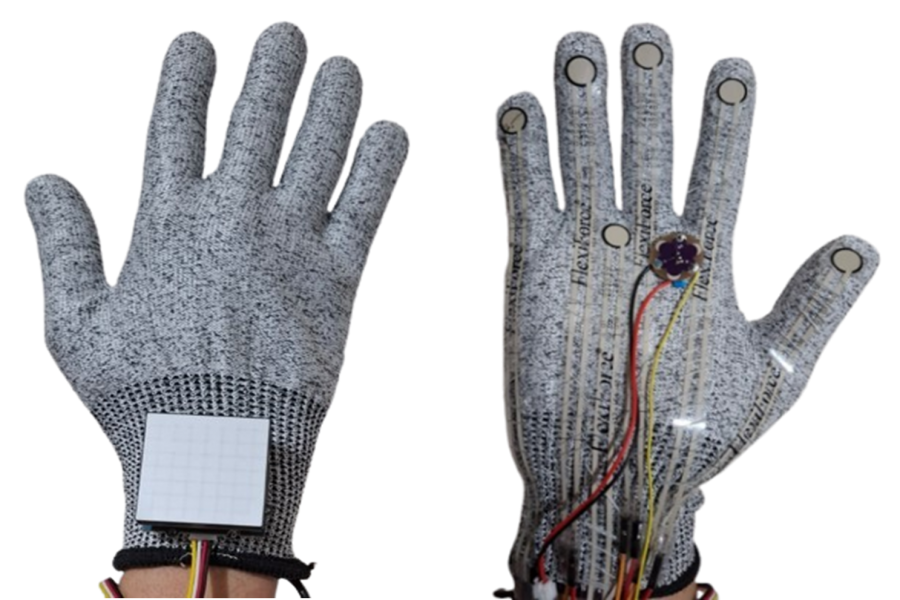
Finally, the system was integrated into a glove, and a functional prototype was developed to demonstrate the practical implementation of the system.