
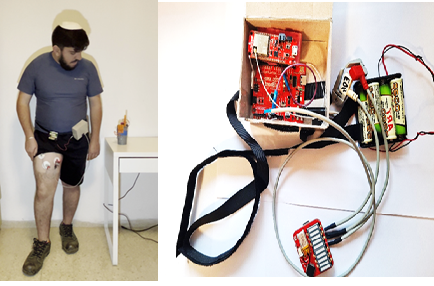
In this project, we developed a system that enables discreet, reliable, and precise control of a pre-built robotic hand. The system is based on EMG signals from the upper leg muscles and is designed for individuals with upper limb amputations. The robotic hand was developed by the Haifa 3D organization, and we focused on designing and implementing an interface that converts muscle signals into commands for the hand.
The main challenge of the project was managing noise during the EMG signal acquisition and transmitting the data for processing by the Arduino controller. To address this, we used shielded cables and Bluetooth communication, creating a floating system that reduced external interference. Additionally, we filtered the sampled signal using a real-time smart Band-Pass filter to improve detection accuracy.
Finally, we successfully implemented reliable muscle activation detection in various forms:
a single press, a sequence of presses, and a long press. Each action was translated into movement commands for the robotic hand according to its predefined states.