
This project focuses on the development and implementation of a motion planning algorithm for a surgical robotic arm using the UR5e manipulator. Leveraging the capabilities of the Rapidly-exploring Random Tree Star (RRT*) algorithm, the project aimed to create collision-free, optimal paths in high-dimensional configuration spaces. The algorithm was first implemented in a two-dimensional environment as a “dry run” to validate its principles before scaling to the six-dimensional configuration space of the robotic arm.
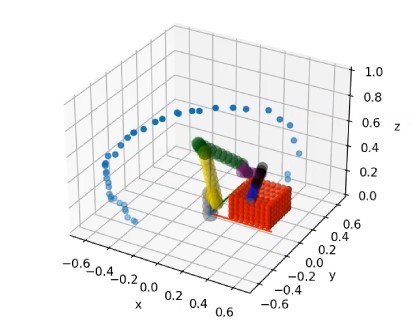
Key challenges addressed include obstacle avoidance, self-collision prevention, and path optimization in complex environments. A custom simulation environment was used, incorporating realistic obstacles modeled as spheres to mimic walls, boxes, and anatomical structures. Despite achieving feasible paths, the project identified limitations in the algorithm’s ability to refine paths in high-dimensional spaces due to sparse node placement and probabilistic constraints.