
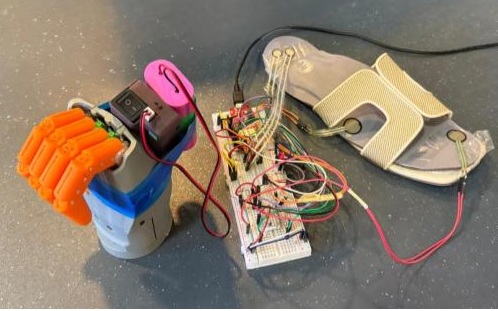
This project presents the development of an intuitive, foot‑operated control system for a prosthetic robotic hand. Many individuals using prosthetic hands struggle to operate them naturally, especially when the other hand is occupied, weakened, or missing. Existing control systems often require extensive training, may lack accuracy, and are not always suitable for everyday use. Our solution is a smart sensing insole placed inside the shoe, equipped with five strategically positioned pressure sensors on the foot. These sensors detect natural foot‑press patterns – forward, backward, and side movements – and convert them into control signals. An ESP32‑WROOM microcontroller processes the sensor data, performs calibration, normalization, noise filtering, and pattern recognition, and then sends wireless BLE commands directly to the prosthetic hand. The system enables intuitive actions: – Forward pressure: gradually opens the fingers. – Backward pressure: gradually closes the fingers. – Right/left pressure: rotates the wrist digitally (discrete input). In addition, the system includes a LED matrix that provides immediate visual feedback. For the analog sensors (front and back), the LEDs illuminate progressively as pressure increases and fade out smoothly as the pressure is released. This allows the user to clearly observe the intensity and behavior of the applied force in real time.
The project was carried out in collaboration with the Haifa3D organization, with an emphasis on accessibility, low cost, user comfort, and natural interaction. The outcome provides a functional foundation for an easy‑to‑use prosthetic control solution, with potential for future enhancements such as more complex movements, improved pressure‑analysis algorithms, and personalization for different users.