
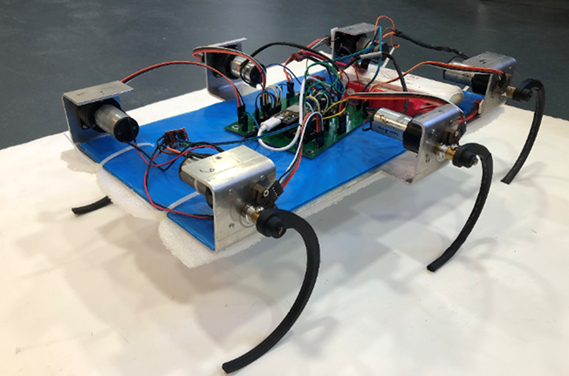
In this work we produced a robot with 6 legs, who’s propose is to be able to pass through any terrain. Each leg is driven by a motor, and so the legs are independent from one another.
The robot is driven by ESP32, which was chosen as it has multiple cores, many PWM GPIOs and both WiFi and Bluetooth capabilities.
The robot has 5 different states: stand up, walk, turn around, climb stairs and stop.
The robot is controlled by an application called Blynk, which is based on WiFi, and allows you to chose one of the 5 states.