
This project is all about developing a control algorithm, which will allow a given DJI Tello drone to execute the following stages:
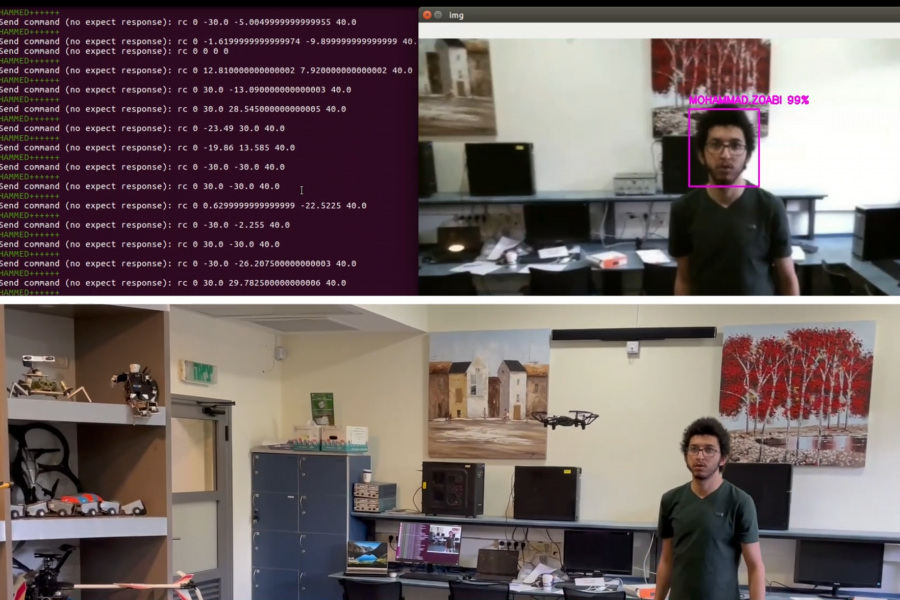
The drone has to: take off, and starts the search for the target (Mohamed face) , when the drone finds the target, it starts tracking it and get past the obstacles if necessary , in addition The entire process needs to be done autonomously.
The algorithm was developed in python.
In this project, we have implemented an image processing system using the video stream from the drone. In addition, we have analyzed the different ingredients of the position error and built a control system which corrects these errors.
The main conclusion of this project is that building an actual control system (which controls a quadcopter in this case), has more aspects than a theoretical control system, and has more considerations we needed to think about.