
This project is all about developing an Optimal path for Tello navigation between two defined locations (CRML lab to Kobi’s Office), through the navigated path the quadcopter needs to avoid obstacles so he can reach the end point properly. DJI Tello drone to execute the following:
The drone has to: take off, then to detect if the lap’s door is open or closed, flying through the planned path only if open, Tello Drone may face obstacles (humans at the corridor) in his way so it needs to avoid them if they interrupt him and going back to the planned path, otherwise, continue flying according to the planned path. At the end of the bath, he needs to detect a chair as his final target and land on it properly ending the path.
The algorithm was developed in python.
In this project, we have implemented an image processing system using the video stream from the drone. In addition, we have analyzed the different ingredients of the position error and built a control system which corrects these errors.
The main conclusion of this project is that building an actual navigation system (which navigates a quadcopter between two locations in this case), has more aspects than a theoretical navigation system, and has more considerations we needed to think about.
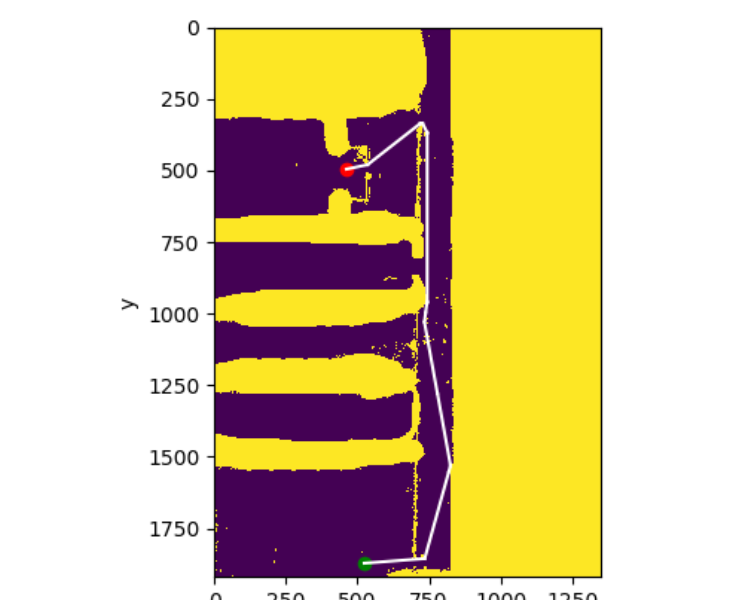
In this picture we can see the output of the algorithm we implement, an optimal path between CRML lab’s (Green point) to Kobi’s Office (Red point).