
In recent years, the autonomous vehicle industry has been growing rapidly, with companies such as Tesla, General Motors and Mobileye competing to develop optimal solutions. The field is accompanied by many challenges that highlight the complexity of real-world driving scenarios, such as: planning algorithms for traffic planning, taking into account the dimensions of the vehicle and its physical limitations, and understanding the environment and its obstacles .
An optimal route for a vehicle can be defined in a variety of ways. For example, it is possible to optimize the length of the route, the slope of the route, the amount of fuel consumed on the route, and more.
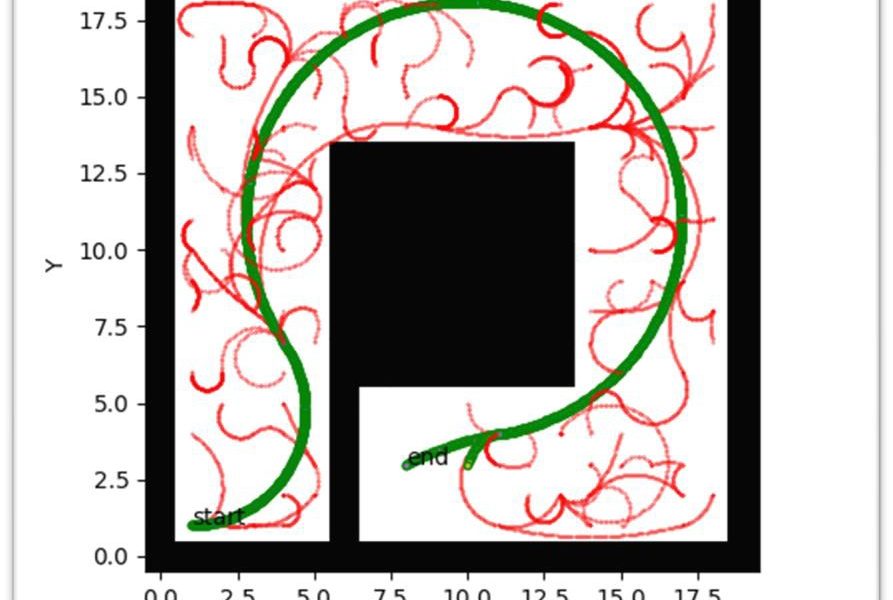
We chose to find an optimal route for the world of racing, where the optimal route is the fastest one – the route with the minimum time needed for its completion. That is, given a map that contains a start point, an end point, and obstacles, we would like to find the fastest route for a racing car, which will start at the start point and reach the end point without colliding with obstacles along the way.
In this project, we implemented different route planning algorithms and compared them, until the completion of an optimal Kino-dynamic RRT* algorithm, which succeeds in taking into account the limitations of the vehicle and placing emphasis on finding the shortest time to complete the route .