
Due to ever-expanding technology and research in the subject of Robotics, Robots became an integral part of our day to day life. drones in particular are becoming cheaper, more durable and smarter making them more wide spread than ever and also more useful than ever with their level of use only expected to rise and expanded to many different fields such as product commotion and traffic handling.
One application where we believe drones can be useful in daily life is tracking and following targets whether we talk about military and law enforcement where the ability to automatically track a suspect can be very useful in catching criminals or people who aim to cause harm or even for consumers for example for taking video and pictures while preforming activities that make us not able to manually control the drone for example bike riding.
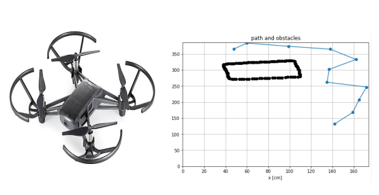
In this project we implemented an algorithm that is based on RRT path planning that allows a drone to autonomously track and follow a target while remaining at a constant distance from it. Once the target disappears from the sight of the drone it will decide whether the target is hiding behind an obstacle or not. If it decides that it does than the drone will try to estimate the whereabouts of the target and will generate a safe path from where it is now to where it wants to go and will follow it in order to relocate the target and continue following it.
Our algorithm produced excellent results. It was indeed able to allow the drone to re find the target without colliding with the obstacle.