
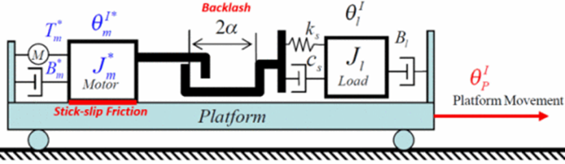
Friction and Backlash are present in almost all electro-mechanical systems:
Servo system drives (linear/rotational) , Single/double gimbals systems,
Robotic manipulators, Inertial/optical stabilized platforms.
Friction control problems:
– causes rapid disturbance changes when the velocity is reversed.
-performance degradation: tracking errors, limit cycles, hunting
-wear and damage to components
–
Backlash control problems:
– decreased steady-state accuracy;
– tracking errors, limit cycles
This research will be focused on the modern control design approaches for servo systems that exhibit friction and backlash effects:
1.Friction and Backlash Novel Modeling .
2.Friction and Backlash Compensation Techniques
3.Dual Properties of Friction and Backlash in servo systems
4.Friction and Backlash Reciprocal Effect on the system performance
Software Tools: MATLAB, Simulink