
בפרויקט זה בנינו מערכת המשגרת כדור, משערכת את מסלול תעופתו ונותנת
פקודת מיקום נפילה לעגלה על מסילה המונעת על ידי מנוע DC .
למערכת שני חלקים מרכזיים – חוג המצלמה וחוג המיקום של המנוע.
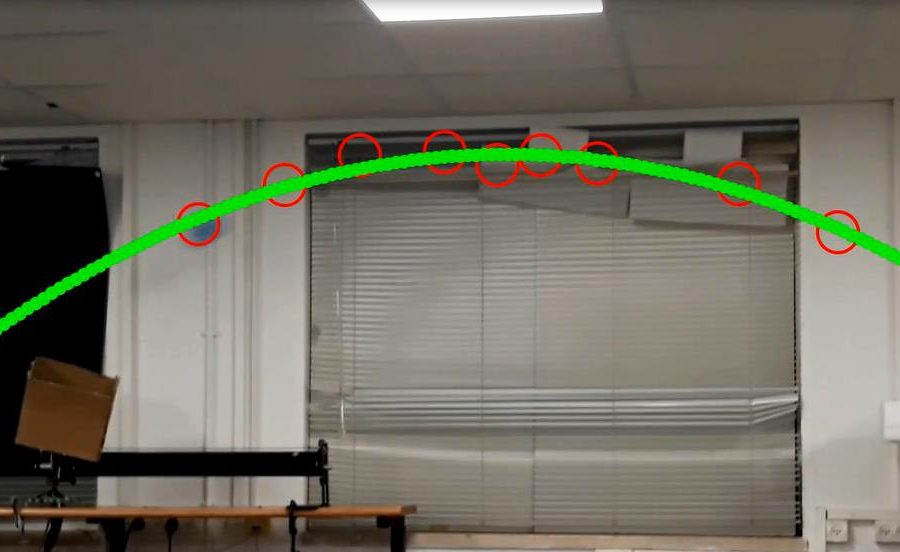
בחוג המצלמה, הונחה מצלמה מול מישור התעופה המסוגלת לבודד את הכדור
באוויר תוך הסתמכות על צבעו הייחודי ביחס לרקע בעזרת עיבוד תמונה. בכל רגע
במהלך עיבוד המידע, בהנתן סט מיקומי הכדור שהתקבלו במצלמה מתעדכן השערוך
למסלול הפרבולי, ומתוך מסלול זה נמצאת נקודת הנפילה של הכדור – שנשלחת
למנוע.
בחוג המיקום של המנוע השתמשנו בחוג מהירות ובחוג מצב על מנת לקבל התכנסות
מהירה לפקודות מיקום והתייצבות מהירה על מהירות אופטימלית לשם תפיסה.
מימשנו בקר מסוג PI שאיפשר התכנסות מהירה ככל הניתן לפקודת מיקום הנפילה
וללא שגיאה במצב מתמיד.