
Overview:
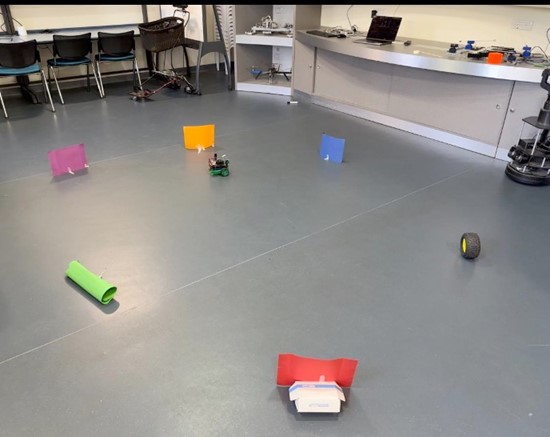
The Jetbot Mini project involved using a robot equipped with wheels, a camera, and a Jetson Nano card. The robot was programmed in Python using Jupyter Notebook to navigate a room by detecting and moving towards objects of predefined colors.
Objectives:
– Develop a system for the Jetbot Mini to automatically navigate to objects of specific colors within a room.
– Ensure the robot can sequentially identify and move to each predefined color, adjusting its path accordingly.
Solution Approach:
– Color Recognition: Employed HSV format to accurately detect and differentiate colors.
– Distance Detection: Used contour drawing around detected objects to determine the distance from the robot.
– Color Search: Enabled 360-degree rotation for comprehensive color searching and navigation.
– Implemented concepts in Machine Learning, Image Processing, Control Systems and State Machines
Conclusions:
– Real-Time Performance: The project underscored the critical importance of real-time performance and accuracy in color-based navigation systems.
– Adaptability: Highlighted the necessity of adapting project goals based on practical challenges and real-time observations.