
The realm of planning and simulation is essential across diverse fields, including applications in drones and aircraft. It involves addressing challenges related to individual agent tasks, coordinating tasks among different agents, and achieving temporal and spatial synchronization. Crucial considerations also extend to the physical limitations of agents and the environment, adding layers of complexity to the planning process.
This project specifically focuses on the navigation challenges associated with drone-delivered packages, a rapidly evolving field. Our solution is an operation scheme, at the core of which lies an algorithm called Scotty. We encapsulate Scotty within blocks that we’ve written, and ultimately perform a simulation in the Unity environment.
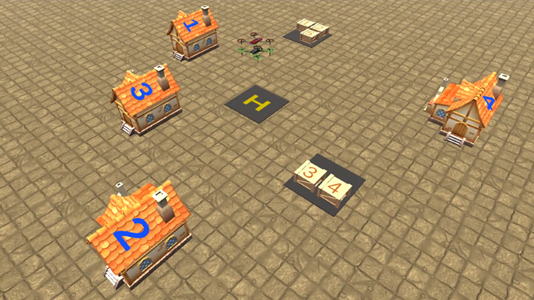
In this problem scenario, two drones are assigned the task of picking up packages from distinct warehouses and delivering five packages to four different houses, all within specified time windows. The planning process considers acceleration, deceleration, rotation times, and adheres to delivery constraints. These aspects collectively mirror the real-world challenges inherent in drone-based package delivery systems.