
Robotic arms are used in a variety of environments from construction to medicine. They are specifically engineered for specific tasks and parameters, and they are hard to generalize for less specific tasks. A promising tool for training robots for generalized tasks is reinforcement learning. Reinforcement learning is an area of machine learning concerned with learning how agents ought to take actions in an environment in order to maximize the cumulative reward.
The project goal is to write different sets of high-level actions, check actions, reward and their influence on the learning process.
In the project we defined four high-level actions, aimed to reach, grab and lift an object.
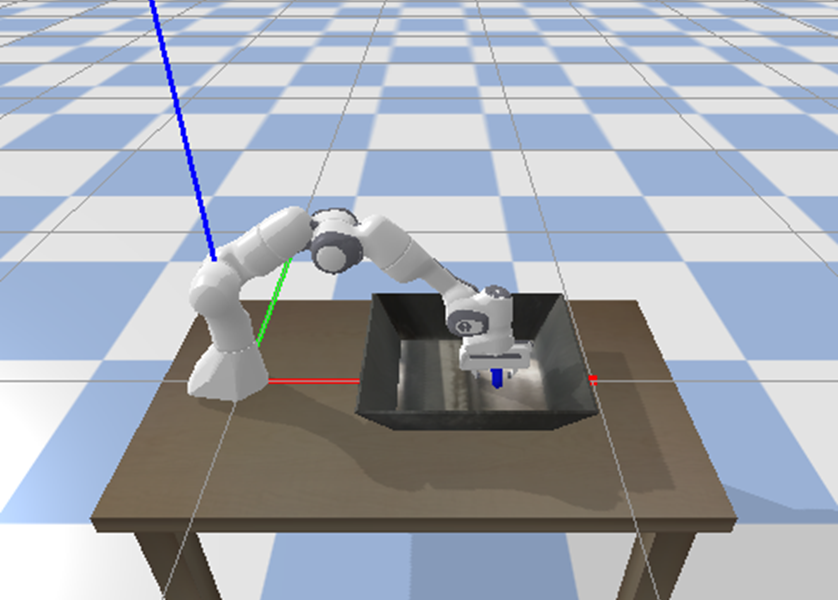
The project is based on Franka Emika Panda robotic arm simulation. Runs on Gym environment, uses PyBullet simulation and use PPO algorithm for RL implementation.