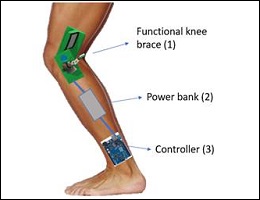
An intrinsic tradeoff between comfort and functionality in the design of knee braces exists. While high immobilization is desired, it comes at the cost of comfort. This discomfort causes a generalized disuse after a couple of days. A functional knee brace with a dual behavior is developed in this work. It immobilizes the knee when maximum pressure is applied on it and allows for free movement during the rest of the step. A prototype has been 3-d printed, and a control algorithm for an Arduino board has been developed. This work shows the feasibility of gait controlled knee braces given the accuracy and low cost of modern controllers and sensors.