
The goal of this project is to develop and evaluate an algorithm for absolute calibration of multiple misaligned sensors, enabling accurate target trajectory reconstruction in 2D and 3D. The system addresses the challenge of angular misalignment between sensors by estimating rotation parameters (yaw, pitch, roll) and refining the global target path from noisy measurements.
The work is based on the “Improved Algorithm for Universal Sensor Registration” framework, which combines Wahba’s problem for optimal rotation estimation with iterative position optimization. For 2D configurations, where range measurements are unavailable, the method uses a triangulation front-end based on multi-sensor azimuth and elevation data to reconstruct distances before running the alignment algorithm.
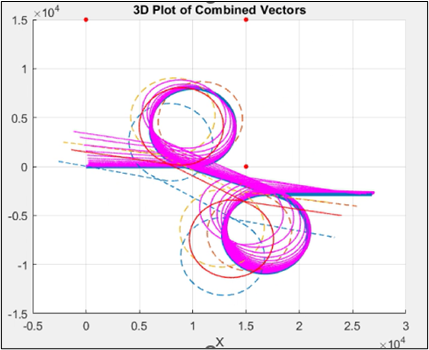
We implemented a full MATLAB simulation environment that generates synthetic target trajectories, simulates sensor positions and rotations, and produces noisy range and angular measurements. The simulation includes both constant velocity and turning phases in the horizontal plane, combined with steady vertical motion. Misalignments are introduced through predefined rotation matrices, and Gaussian noise is added to model realistic sensor errors.
Extensive Monte Carlo experiments were conducted for various noise levels to assess convergence and accuracy. The results show that the algorithm achieves sub-milliradian RMSE in rotation recovery under low-noise conditions, and maintains good performance even with significant measurement noise. This validates its applicability to real-world multi-sensor calibration scenarios.