
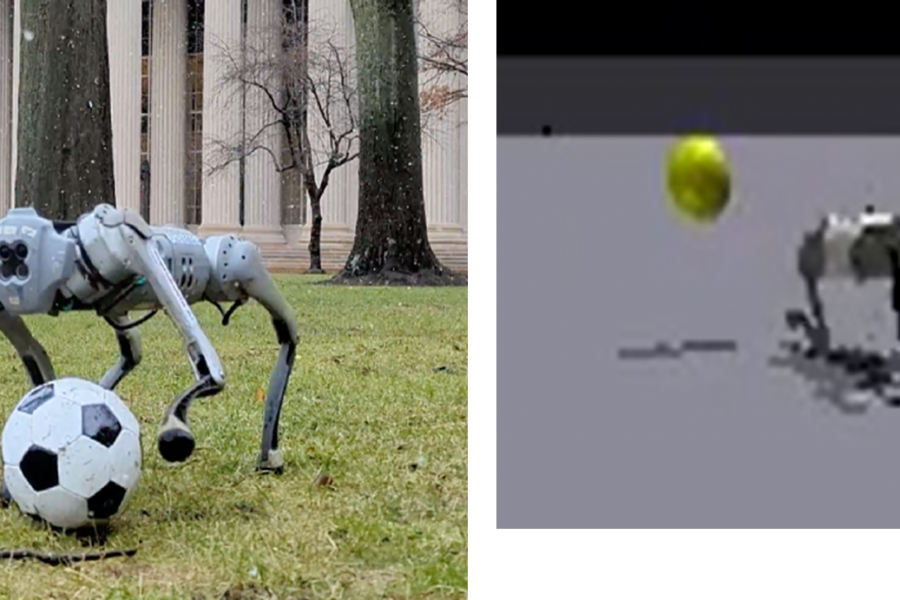
This project explores reinforcement learning to teach a quadrupedal robot (Unitree Go1) how to block an incoming football. Inspired by MIT’s Dribblebot, our approach extends the framework from ball manipulation to dynamic goal-blocking behavior.
We developed a full sim-to-real pipeline:
- In simulation (Isaac Gym), we designed custom reward functions encouraging defensive actions like intercepting and positioning between the ball and the goal.
- In the real world, we integrated a YOLOv7-Tiny based vision system using TensorRT and GStreamer for real-time ball detection.
- Motion commands were computed from detected ball positions and executed using a trained PPO policy.
Despite successful results in simulation and a working real-time loop, sim-to-real transfer remained the main challenge. The robot failed to exhibit stable behavior in physical tests, highlighting the need for further fine-tuning and robustness adaptation.
This project lays the foundation for future research in real-time robotics, perception-to-action pipelines, and sim-to-real learning.