
One of the well-known challenges in robotics is achieving efficient and precise autonomous movement from one point to another using a small robotic platform.
This challenge is reflected in several areas of our lives : in logistics, robots move goods in massive warehouses. In the Home consumer market, A wide range of autonomous vacuum cleaners is available in a wide price range. And in the defense industry There is a growing presence of drones and small robots capable of conducting missions autonomously.
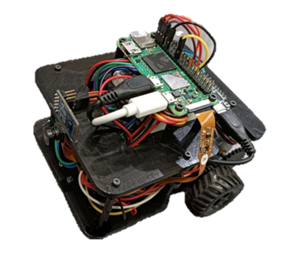
In this project, we present a solution to this challenge with a small robotic platform that utilizes wheels, a range sensor, and a camera to efficiently reach a target point while identifying and avoiding obstacles.