
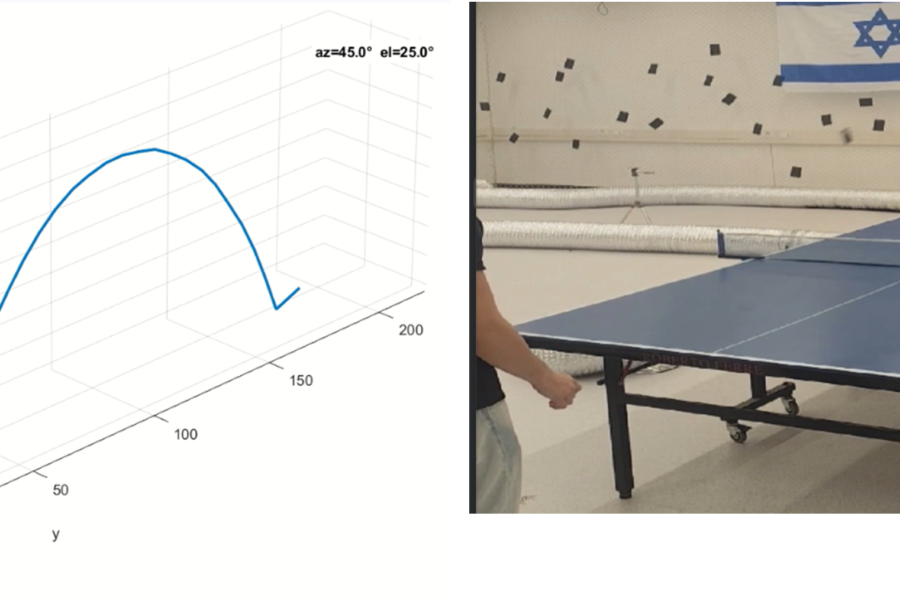
This report presents our work on the PingPong Hawkeye project, whose goal is to implement a proof of concept for a system capable of estimating the position of a ping-pong ball during gameplay using an array of simple cameras. The cameras used in the project are low-cost devices with characteristics comparable to smartphone cameras in terms of resolution and frame rate. During the project, the system capabilities were demonstrated both on a 3D simulation, which enables evaluation of the quality of the reconstructed spatial coordinates, and on real footage of a ping-pong game.
The developed software architecture is divided into three main stages: setup calibration, 2D detection, and 3D position extraction. The calibration stage includes estimation of the intrinsic and extrinsic camera parameters and provides the basis for spatial reconstruction. The 2D detection stage is based on the fusion of three methods: color, shape, and motion, using tools such as HSV-based processing, inter-frame motion analysis, and geometric matching. The 3D position is then extracted by fusing information from multiple cameras after the detection stage. In addition, the implementation makes use of parallel programming across cameras, detection methods, and different detected objects in order to improve