
|
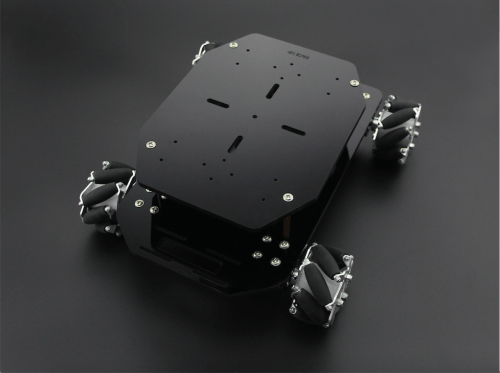
בפרויקט זה נפתח רובוט נייד בשיתוף חברה לתועלת הציבור בשם IFA . הרובוט מיועד לשינוע אנשים וסחורות בסביבה עירונית, מפעלים, קניונים ועוד. פרויקט זה יורחב בהמשך לפיתוח של להקות רובוטים המשתפות פעולה ומידע להבנה טובה יותר של המרחב, כאשר נדרש לשנע משטחים בגדלים שונים ובמשקלים שונים ובפרמטרי תנועה שונים. הרובוט יבנה בתצורה של משטח נמוך המצויד בארבעה גלגלים בגודל של 30X20. ויצויד במערכת ראייה היקפית וחיישנים, אשר יכנס מתחת למשטח שאותו נדרש לשנע.
הרובוט ייטען מפסי טעינה, שיספקו לו חשמל ותקשורת ,שיפוזרו במרחב העירוני. הרובוט יהיה מסוגל לתקשר עם רובוטים אחרים בסביבתו לצורך שיתוף פעולה ויזהה את מיקומו במרחב בעזרת סימני זיהוי שיוצבו על פסי טעינה שיפרסו במרחב.
הפרויקט הינו דו סמסטריאלי ויורכב משני חלקים: בסמסטר הראשון יהיה עיסוק במרכיב התיאורטי של הפתרון, שיתבטא בבניית מודלים וסימולציה וויזואלית בזמן אמיתי.
בסמסטר השני יתבצע יישום מלא של הפתרון, תוך שימוש באבני הבניין אותם תספק חברת IFA.
חלק ראשון: תכנון וסימולציה של מעגלי הנעה חשמליים למנועי הרובוט, בניית מודל התנועה של הרובוט, סימולציה ויזואלית בזמן אמיתי של רשת (קמפוס הטכניון) מרובת רובוטים עם ביקושים “חיים”
חלק שני: בנייה של הרובוט מבחינת חמרה, תכנה ומכניקה
|
|
הפרויקטים יעשה בליווי תעשייתי צמוד.
הסטודנטים ירכשו כישורים מעשיים נוספים כגון: תכנון ועריכה של מעגלים מודפסים. תכנון מכני (SOLIDWORK). ייצור חלקים ב CNC וטכניקות נוספות. תכנות Real-Time/Embedded
|