
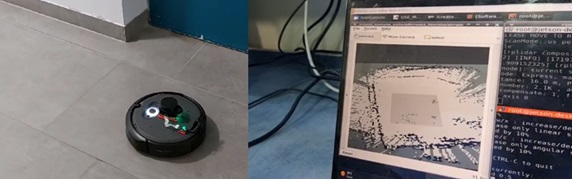
The project goal was to develop a mobile robotic system capable of localizing and mapping the environment using SLAM algorithm. The robotic platform, iRobot Create3, and computing platform, Nvidia Jetson nano 4GB, were integrated into a single system orchestrated using ROS2 middleware. Establishing communication between the different components of the system was done using several guides provided by Nvidia and iRobot. Since those guides are constantly updated and some of them are still in beta versions a lot of changes were needed to create proper connections. At the end of the project, we succeeded in running a SLAM demo which identified objects and there general locations. We have solved different problems while trying to keep the solutions modular, efficient and mobile. The system is now available in the lab for future projects.
The challenges we encountered led us to the conclusion that using Nvidia Jetson nano 4GB as the main computing component of the system is not optimal. The reason being a mismatch between the operating system provided for the Jetson.