
In recent years, significant progress has been made in the field of soft
robotics and robot interaction with deformable objects- flexible materials
such as ropes, fabrics, and cables. This area is considered one of the
key challenges in robotic control and learning, since the behavior of
deformable objects is nonlinear, history-dependent, and influenced by
multiple external forces, making it difficult to predict and control precisely.
The goal of this project was to develop an advanced experimental
environment that serves as a foundation for implementing and training
reinforcement learning (RL) models, enabling robots to autonomously
learn how to perform complex manipulation tasks involving soft objects –
such as rope tying, wrapping around objects, or coordinated two-arm
operations.
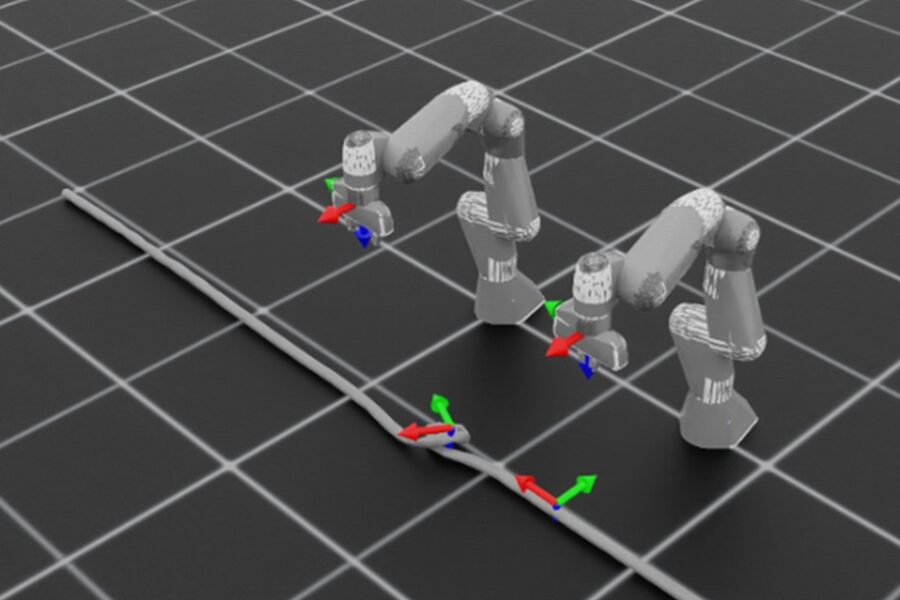
As part of the project, an interactive robotic environment was developed
using NVIDIA Isaac Lab, simulating a dual-arm Franka Panda robot
system. The environment, called RopeProjectEnv, integrates a full
physical model of a deformable rope, two robot arms controlled by a
kinematics-based motion controller, and a Finite State Machine (FSM)
that defines the sequence of task phases- grasping, lifting, moving, and
releasing.
The modular structure of the environment allows integration with
supervised or unsupervised learning models, adaptive reward functions,
and advanced reinforcement learning algorithms for developing motion
planning and control capabilities in continuous space.