
The project’s goal is to map a room.
A simulation of the sensors scanning a room was built, including all the different sensors features: sensors scan distance, precent of accuracy, scanning angle and false negatives. Two different kinds of sensors were used to map a room: LIDAR sensor and camera sensor. The sensors outcomes were analyzed and compared to the simulation, mean errors were calculated.
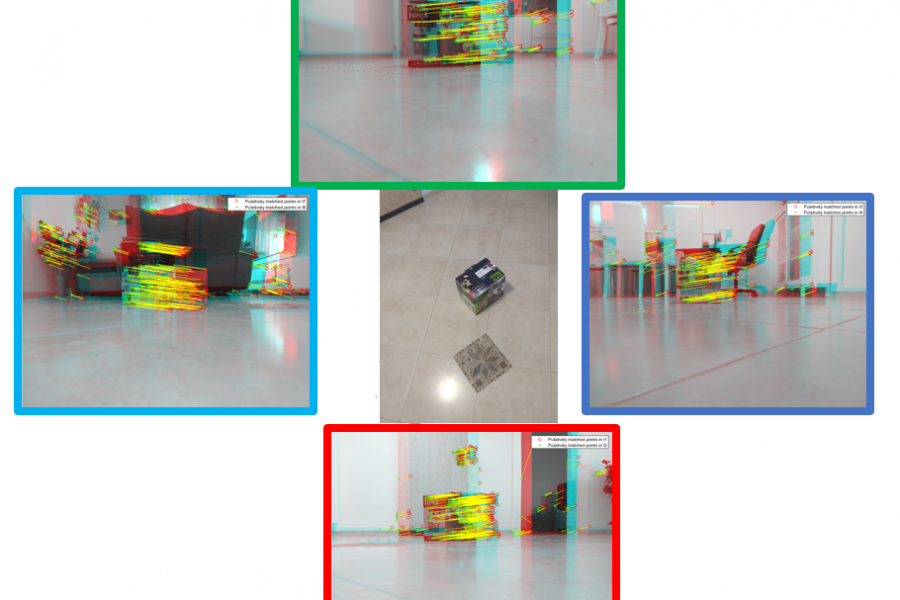
A photo mapping algorithm was developed to get the distance from a photograph by matching SURF features from two aligned photos for every object.
Each sensor improved the other sensor’s scan, the cameras could detect heights and the LIDAR sensor removed the false positives from the cameras scan.
The combined scan is shown along with height detection in a mapped room.