
Solar cleaning Robots are equipped with sensors like IMU that is used to help the robot drive on the surface of the solar panel during the cleaning process.
After Certain distance, the IMU reading starts to drift and as a result of that the robot can’t clean in a straight path.
The brute force solution was to clean in sequences that increases battery consumption and wastes more time in cleaning so the effiency decreases.
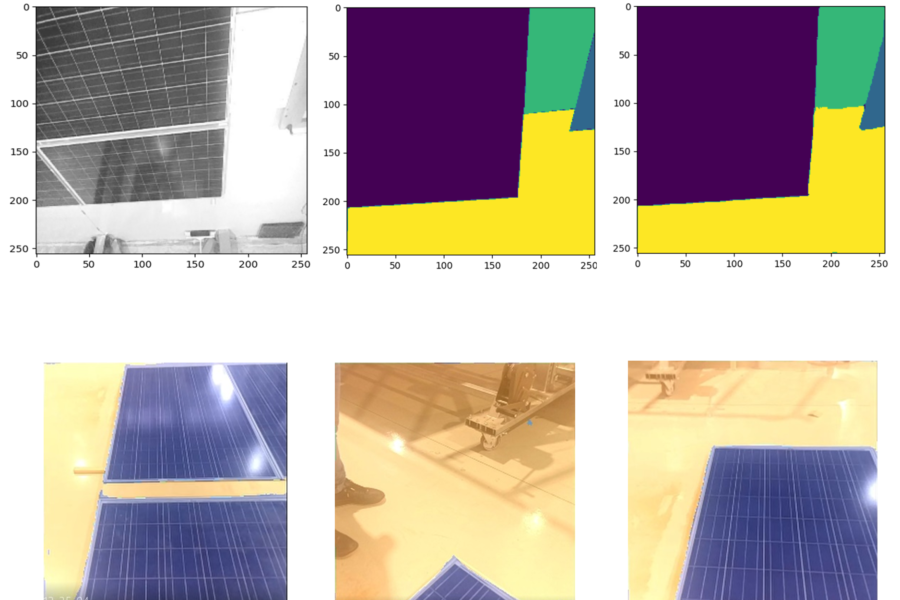
Our solution implemented semantic segmentation of the solar arrays, and classify different objects in robots cleaning path, and that will help the Robot localize and map the solar array in Real Time.