
This project explores the challenge of real-time target tracking using heterogeneous sensors (sensors with different characteristics and noise levels). The study compares two primary estimation architectures: Tight Coupling (TC) and Loose Coupling (LC).
Both methods aim to estimate the position and velocity of a moving object in 3D space, based on asynchronous measurements from two stationary sensors. The system is evaluated using Kalman Filters (KF) and Extended Kalman Filters (EKF) to process the data.
Key simulations include:
– A target moving in two velocity phases across 30 seconds.
– Use of two sensors—one with full spherical measurements (range, azimuth, elevation), and one with only azimuth, elevation.
– Monte Carlo simulations to evaluate accuracy and convergence.
A key method used in this project is triangulation—a geometric technique that uses linearization to create a linearized vector of effective measurements, out of non-linear measurements from multiple sensors. This method requires the sensors to be synced, and it is especially useful when range data is missing or limited, allowing position estimation based on angles (azimuth and elevation). Triangulation is computationally efficient and can simplify the integration of heterogeneous sensor data, making it suitable for Loose Coupling architectures.
Findings
- Filtering dramatically improves accuracy over using raw sensor data.
- Both TC and LC achieve similar performance, but TC is more robust to measurement anomalies and doesn’t require sensor synchronization.
- LC loses information due to the triangulation approximation, but is simpler to implement and scalable across systems.
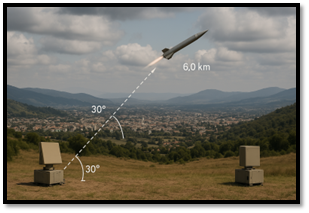
- The geometry between sensors significantly affects accuracy, especially the angle between them. In scenarios where range noise dominates (as in real-world situations), a ~30° angle between the sensors was found to achieve the best overall results.