
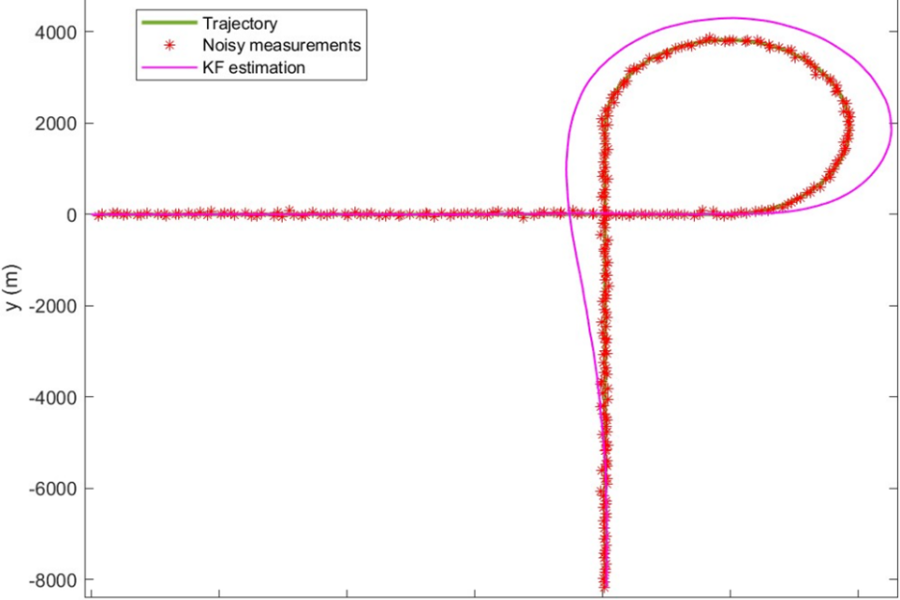
In our project, we addressed the problem of tracking a maneuvering target. Tracking problem is a filtering problem of a moving object. By given a set of noisy measurements, we want to estimate the state vector of the moving object (in our case- position and velocity). During the project, we implemented several tracking algorithms- the Classical Kalman Filter(KF), Interacting multiple model(IMM), Exponentially weighted information filtering(EWIF) and even weighted Interacting multiple model (WMM), which we actually developed. We demonstrate the results of these algorithms on a 3D target trajectory, analyze the advantages and disadvantages of each algorithm by comparing the RMSE errors we obtained from Monte Carlo simulations. We discuss the trade-offs involved in choosing the algorithm parameters, such as process noise in the KF algorithm or Tau(decay factor) in the EWIF algorithm, which have a significant impact on algorithms results.