
Tracking problem is a problem of estimating the state (position, velocity, etc.) of an object, given some measurements. A common way to preform tracking is by the help of the Kalman Filter (KF) algorithm. This algorithm is basically a casual, linear, time-discrete filter which enable us to estimate the state space coordinate in a noisy environment.
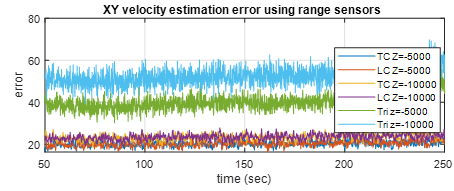
In this project we looked on extension of the Kalman Filter in order to estimate the state space of an aerial target (position, velocity and acceleration) in a non linear trajectory and with non linear measurements (range and doppler measurements). Specifically we compared two different estimators: TC estimator which consists of the Extended Kalman Filter (EKF), and LC estimator which consists of an iterative algorithm called Trilateration followed by a KF.