
Goals
• Using simulated range sensors to track maneuvering target.
• Using EKF (Extended Kalman Filter) to achieve low estimation error.
• Examine the effect of the layout of the sensors over the error.
• Overcome sensors faulty measurements.
Project summary
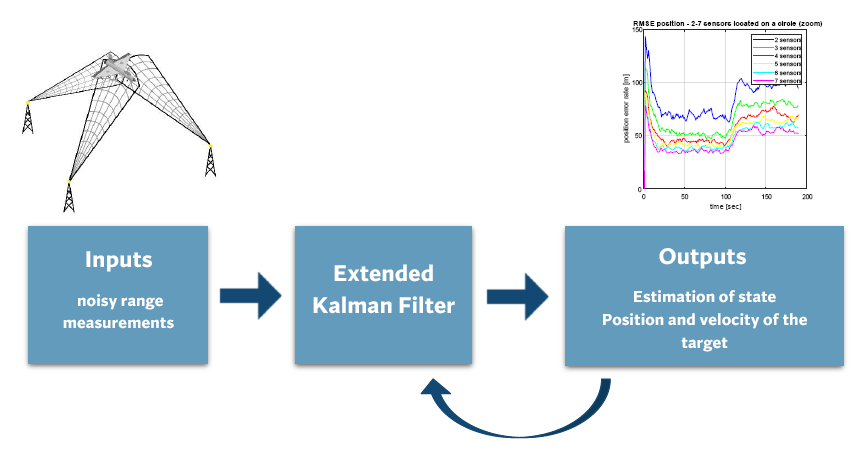
First, a given path of a maneuvering target is provided. Basic setup of simulated
range sensors is used to detect the movement of the target. EKF, a recursive tracking
algorithm, is implemented to estimate the motion (position and velocity of the
target), based on the sensors data and assumed model of motion.
Different setups of sensors are examined, trying to minimize the estimation error.
These setups have different layout in space and different number of sensors.
Statistical tools are used to deal with problems of faulty measurements provided b