
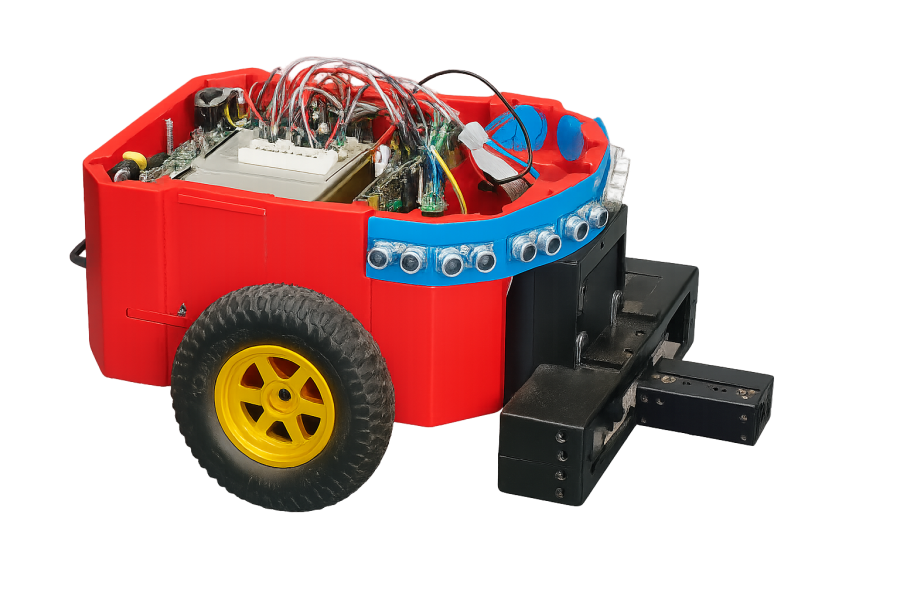
The Pioneer 3 series of robots, once widely used for research and education, have long gone out of production, leaving many existing units nonfunctional due to aging hardware and obsolete control systems. This project aimed to revitalize one such robot by reengineering its control architecture. The work focused on integrating the original drive system and sensors with modern microcontrollers and communication interfaces, replacing legacy electronics while preserving the robot’s core capabilities. The result is a fully operational platform that combines the robustness of the original design with the flexibility and expandability of modern embedded systems—allowing for further development in areas such as autonomous navigation, sensing, and control experimentation.