
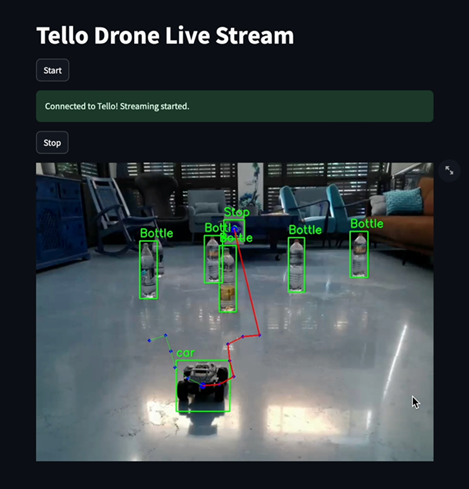
In this project, we use a Tello DJI drone to track a vehicle. Every half second, the drone captures an image and sends it to a computer. The computer receives the image and, using the YOLO algorithm, identifies objects in the image – the vehicle, obstacles, and the target. The RRT algorithm is then used to compute the optimal path from the car to the target considering the obstacles, and the path is displayed to the user.