The SaveMatic project offers an innovative solution to the challenges associated with managing multiple cards and loyalty programs. Through a smart app, SaveMatic enables users to select the most beneficial discount at the time of purchase without needing to intervene in the transaction process. The app leverages advanced technologies such as Next.js, React, and Firebase to deliver a smooth and rapid user experience. With features like responsive design, multi-language support,...
Categories:
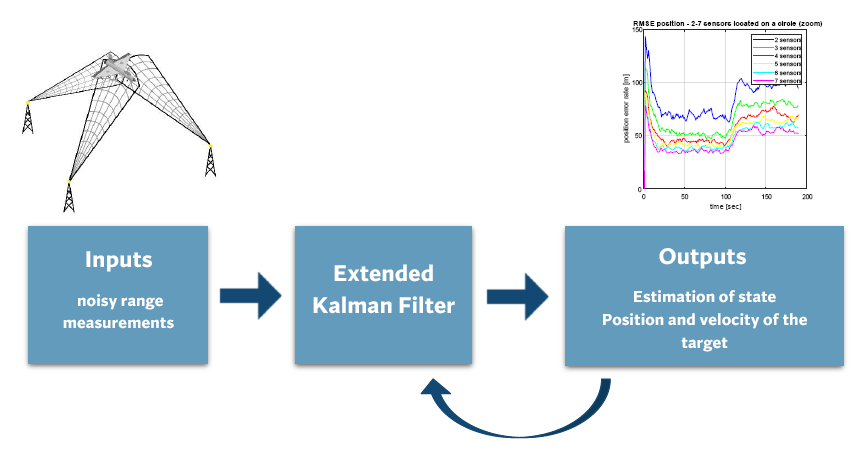
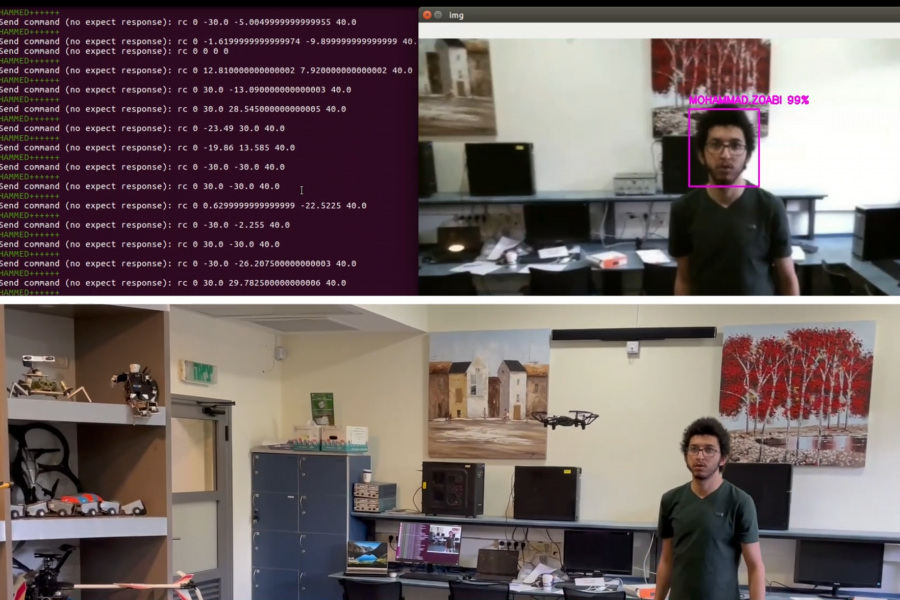
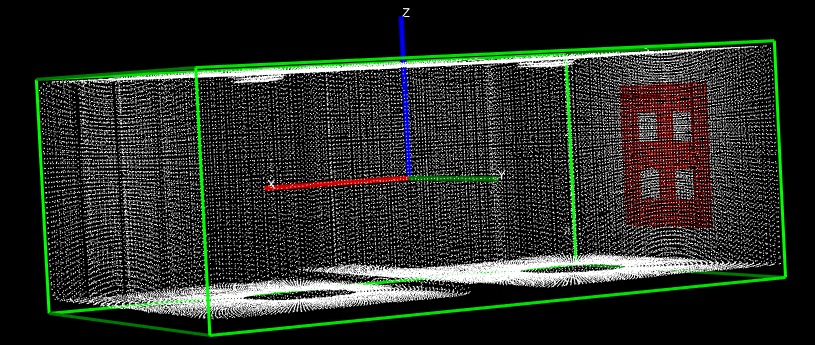
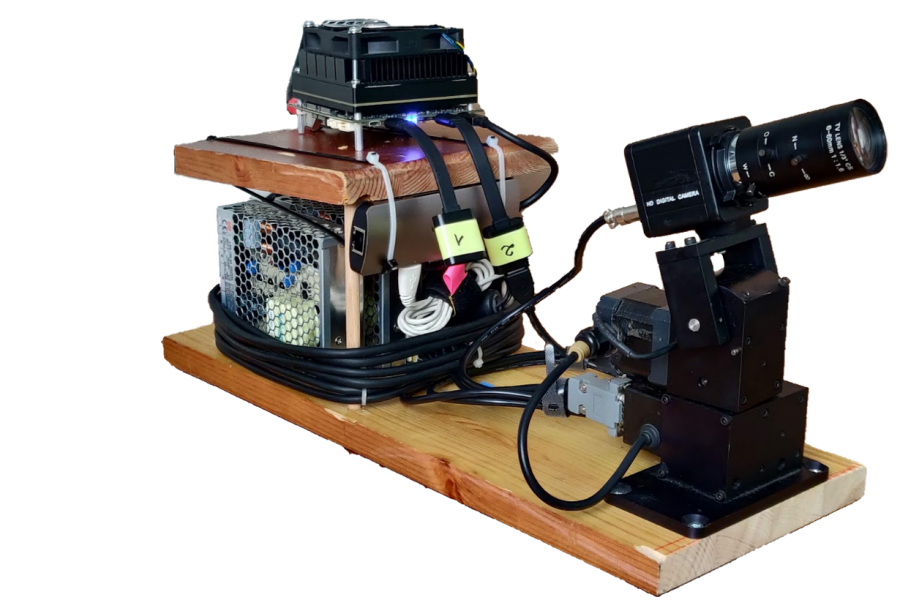
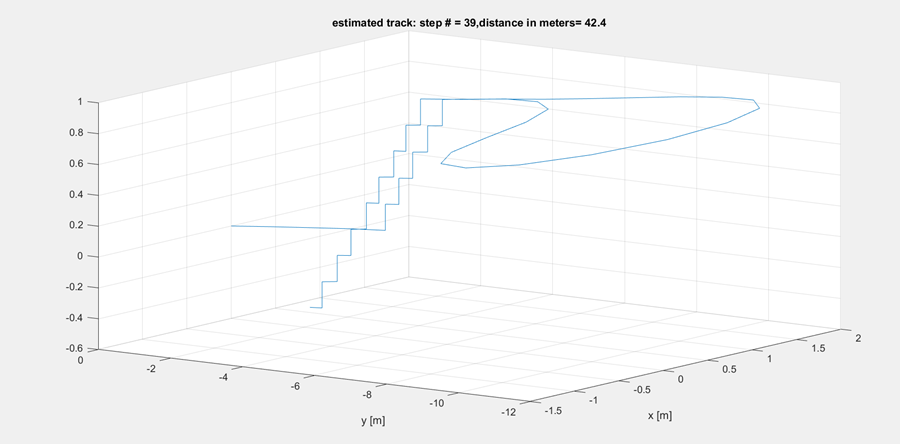
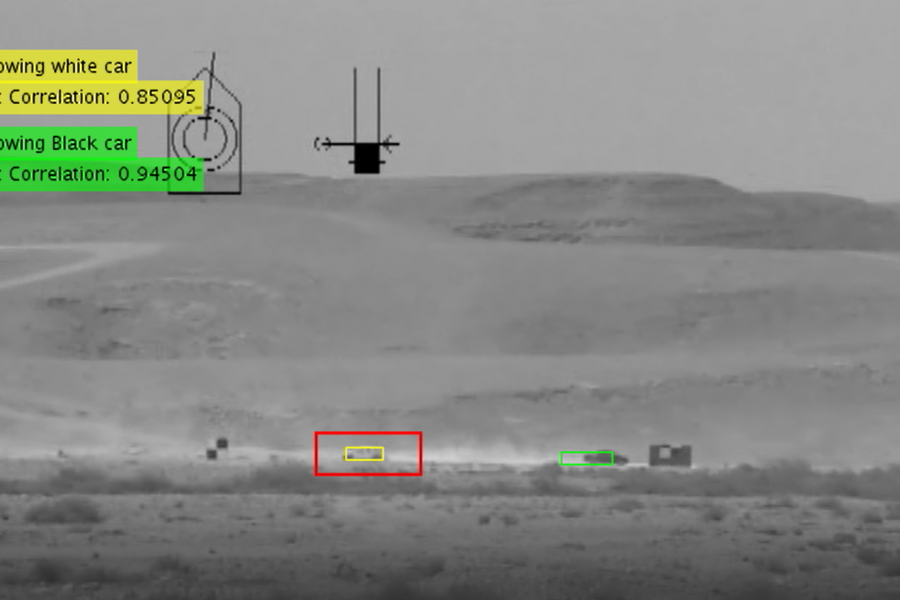
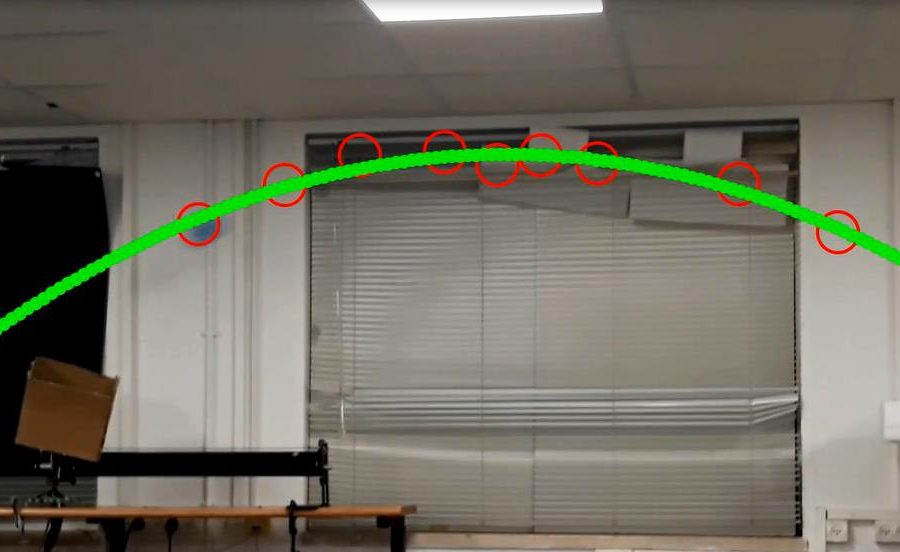
Control and Algorithm