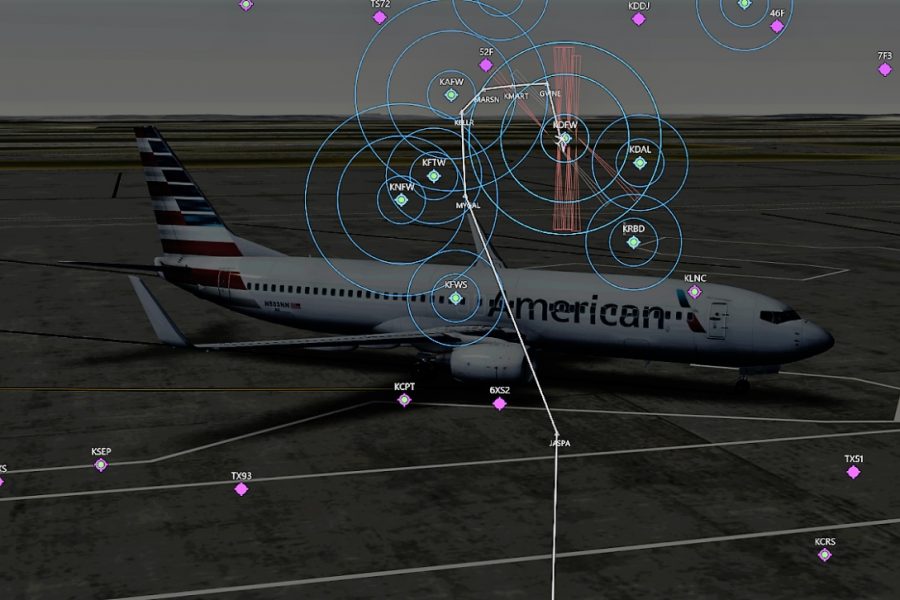
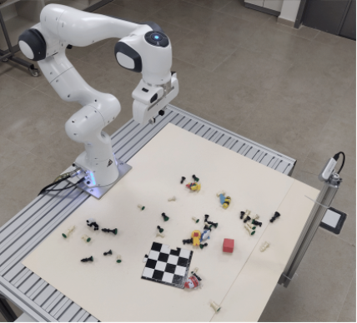
Introduction Multiple Object Tracking (MOT) is the task of locating objects in a sequence of frames (video or live) and match the found objects between the frames. Tracking objects is known and important task in Computer Vision, as it has many use cases. Tracking of military vehicles helps get a better understanding of the battlefield at real time and take us one step closer to autonomous systems. Project Goals Track...
Categories:
Machine Learning