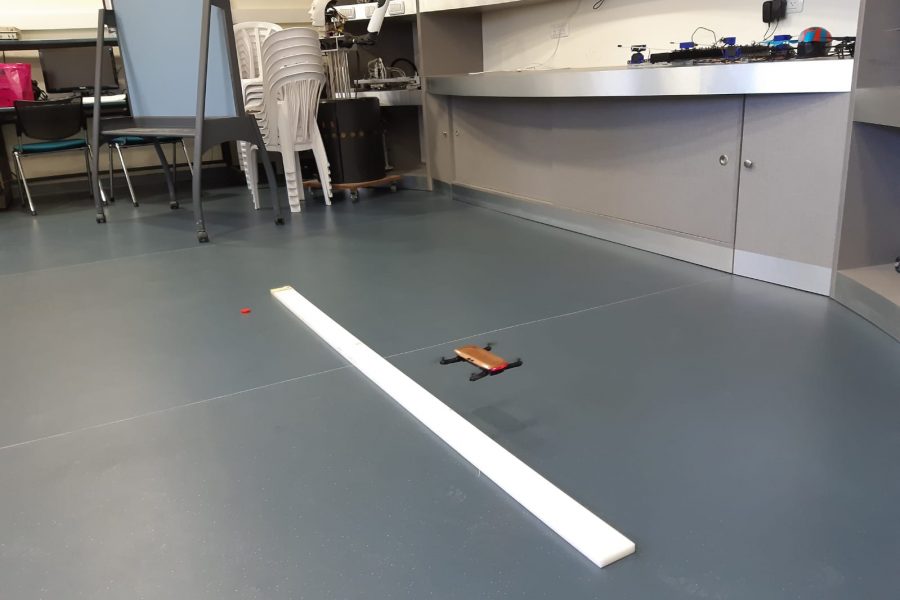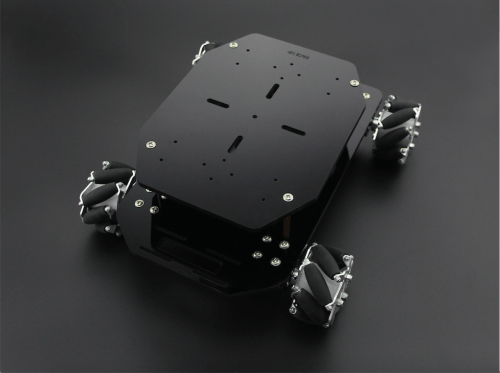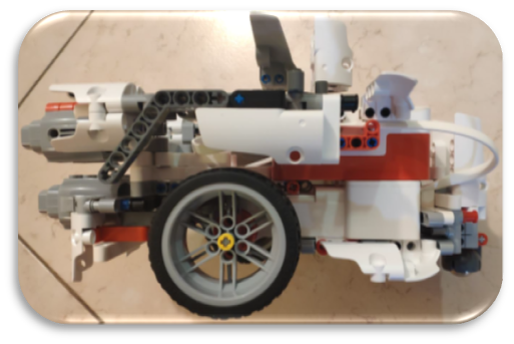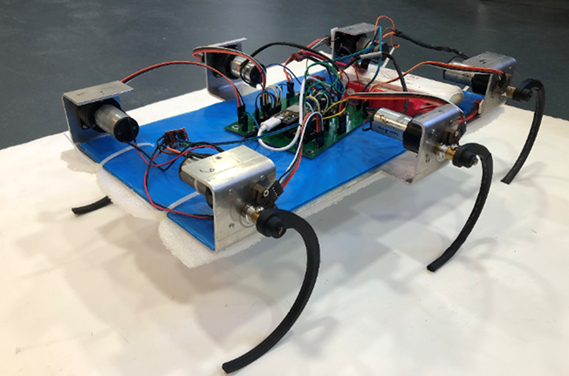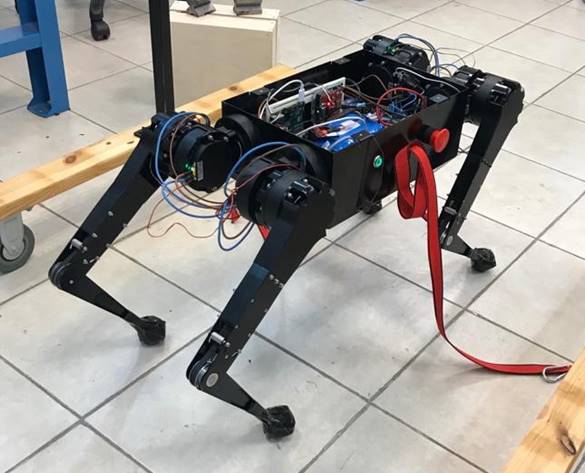
אחד האתגרים הבולטים היום בעולם הרובוטיקה הוא רובוטיקה בסביבת פנים (Indoor Robotics). ) בסביבה זו על הפלטפורמות להיות מסוגלות להכיל מגוון יכולות על מנת להשלים את המשימה; יכולות כגון תמרון בסביבה רווית מכשולים, עבירות, חישה מתקדמת, התמודדות עם תנאי סביבה שונים וכו’. פרויקט פלוטו הינו פרויקט שהתחיל דרכו בפקולטה להנדסת מכונות בטכניון בפיתוח פלטפורמה קרקעית בעלת יכולת טיפוס מדרגות תוך כדי נשיאת משקל נוסף של 2 ק”ג ובעלת זמן עבודה...
Categories:
Robotics and systems