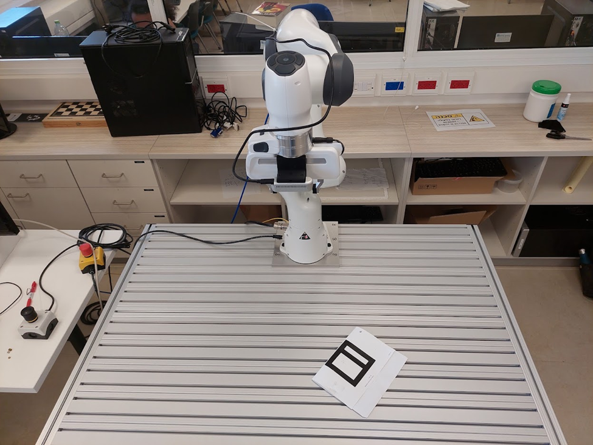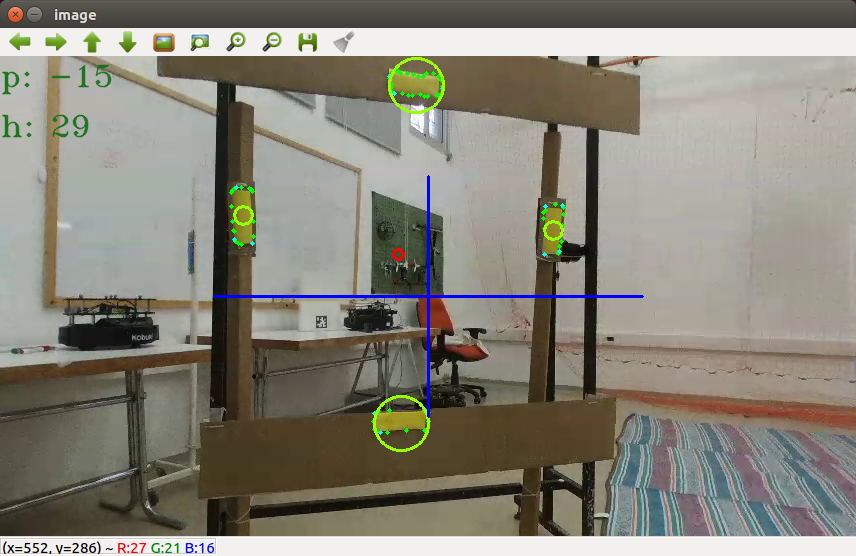
Cameras and visual systems are an excellent way to close a control loop on robotics systems, giving greater precision than when just using motor feedback. For the system to be accurate, the camera needs to be calibrated so that its pose in relation to the robot base is known and this must be done whenever the camera is moved, which is very time consuming when done manually. In this project...
Categories:
Robotics and systems